応募規定
競技規定に合致するロボットが製作でき、競技当日競技に参加できる方であればどなたでも参加できます。
個人、グループのどちらでの参加でもかまいません。
ただし、グループ・団体参加の場合の1グループあたりの人数は6名以内とします。
また、中学生、高校生であってもロボットが製作可能であれば参加できます。
競技課題 自律型ゴルフロボット競技
人間で言うところのゴルフと同じです。
自律ロボットが、ティーグランド(スタートエリア)から、グリーン領域にあるホールにボールを入れるまでの打数を競うゴルフをもした競技です。
ボールは、ロボットの持つクラブでのみ打つことができ、打った後はロボットは自律的に自身のボールの位置まで移動し、カップに向けて打つことを繰り返します。
ただし、競技開始後はオペレータがロボットの操作をしたり、手を触れたりすることはできません。
コンピュータがすべての操作を行う完全自律型ロボットによる競技です。
競技場の見学・試走に関して
大会1週間前を目安に山梨大学丹沢研究室にて当日使用する競技場を確認のため設置します。
(設置しましたら現ページでお知らせします。)
飛距離(打距離?)コンテスト ボールの転がす距離の正確性を競う競技
本年度は,エキシビションとしてボールを転がす制御の正確性を競うコンテストを実施します.(あくまで,エキシビションです)
ロボットは初期位置の固定したまま,ボールをセットし,50㎝,100cm, 150cmの距離に引いてあるラインにできるだけ近くなるように打ち出す競技です.
各,距離に対し,2回ずつ打ち出し,目標距離との差の平均値をその距離での成績とします.
3つの距離の成績(誤差)の平均値の合計が最も少ないチームから順位を付けます.
(注意:このコンテストは,基本的に主競技の成績には関係ありません.ただし,主競技で順位がつかなかった場合は,このコンテストの結果で順位をつけることがあります)
このコンテストの競技コースは,主コースのフェアウェイで使用しする人工芝(幅約90㎝)を平らな床面に広げたものとします.
ロボットの制限は主競技と同じとします,
ロボットの前に,操作者がボールをセットした状態からスタートになります.
ロボット
以下の項目を満たすロボットを使用します。
- ロボットは完全自律型とします。
競技開始後は人による操作は一切行ってはなりません。
- ロボットはフィールド外との通信はしてはいけません。
- ロボットは1台のみ使用可能です。
- ロボットの大きさは、「縦・横・高さ=300mm×300mm×500mm以下」とします。
規定のサイズにクラブとスイングするための腕は入りません。
ただし、ロボットのサイズ計測のため腕は取り外し可能でなければなりません。
- ロボットの重量は6kg以下とします。
- ロボットは外部からの電源供給はしてはいけません。
- ロボットはスイングすることでボールを打ち移動させなければなりません。
- ロボットは規定の大きさを超える変形をしてはなりません。
- ロボットの分離は禁止とします。飛び道具等の使用も分離とみなします。
- スタート時、ボールはティークランド内においてなければなりません。
(ボールを打つ際、ロボットがティーグランド内からはみ出さない位置にボールを設置してください。)
- ロボットはスタート時にスタートエリア内に入っていなければなりません。
従って、ロボットはスタート後、スタートエリアからティーグランド内のボールまで必ず移動し、第1打を打たなければなりません。
- ロボットはボールを傷つけてはなりません。
- ロボットは競技場の機器などを改変・破損してはなりません。
- ロボットに使用するCPU、電池、モータ等に制限はありません。
- ロボットはタイムアップと同時に停止しなければなりません。
- 同じ学校から複数のロボットを出場させる場合、原則として同じ機構のロボットは禁止です。
クラブ
- クラブフェイスの面はフラットに限定します。
- クラブフェイスの大きさは70x30mm以下に限定します。
競技場
フィールド1
- フィールドは2.7m×3.6mの長方形です。(スタートエリアを含まず)
- フィールドは図1-1のように配置されます。
- フィールドはウレタン発泡の土台の上に制作します。
- スタートエリアは500×500mmとし、ティーグランドの手前に設置します。
- フィールドの画像のDLはこちらからお願いします。
- ホールの位置は大会当日に決定します。
- ホールの直径は直径約100mmとします。
- ホールの中心にはポールを立てます。
- ポールの高さはグリーンの表面から約500mmとします。
- ポールの頂点から、周波数3.3KHzの赤外光(パルス幅50msec)と周波数40KHzの超音波(パルス幅1msec)を1秒間に10回、発光及び送波します。
- スタートエリア及び、ティーグランドの大きさは縦500mm、横500mmとします。
- 図1-1の座標の値は、図1-2長方形の中心を示しています。、
- 試合当日のフィールドは必ずしも図1-1のとおりになるとは限りません。
- フィールド1はバンカーに砂を入れるため会場の床(コンクリート)の上に青いブルーシートを敷き、その上に設置します。
したがって、フィールドの周囲はブルーシートが数10cm程度見えている状態になります。
※図1-1の競技コートは仮のものです。変更される可能性があります
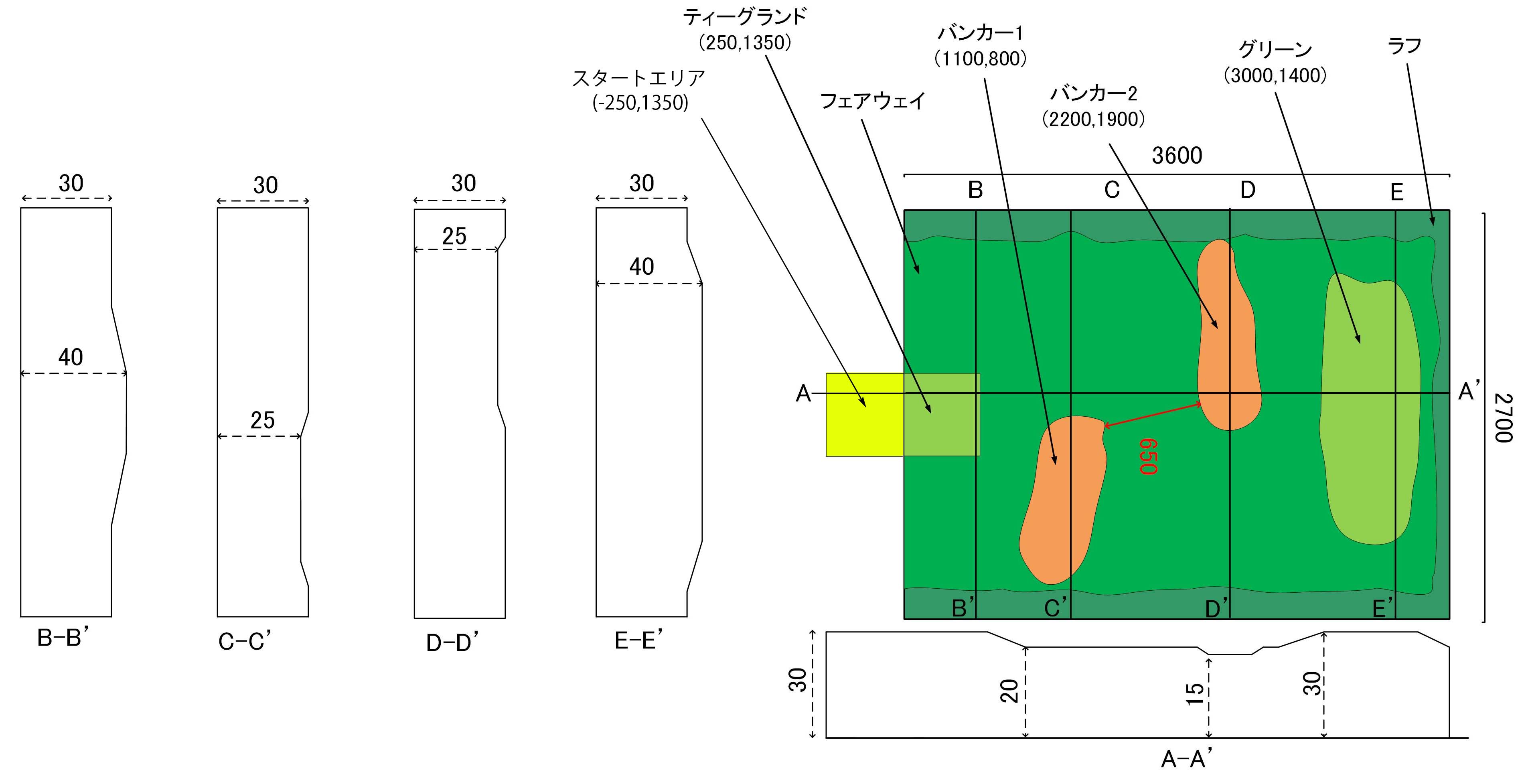
図1-1 競技コート |
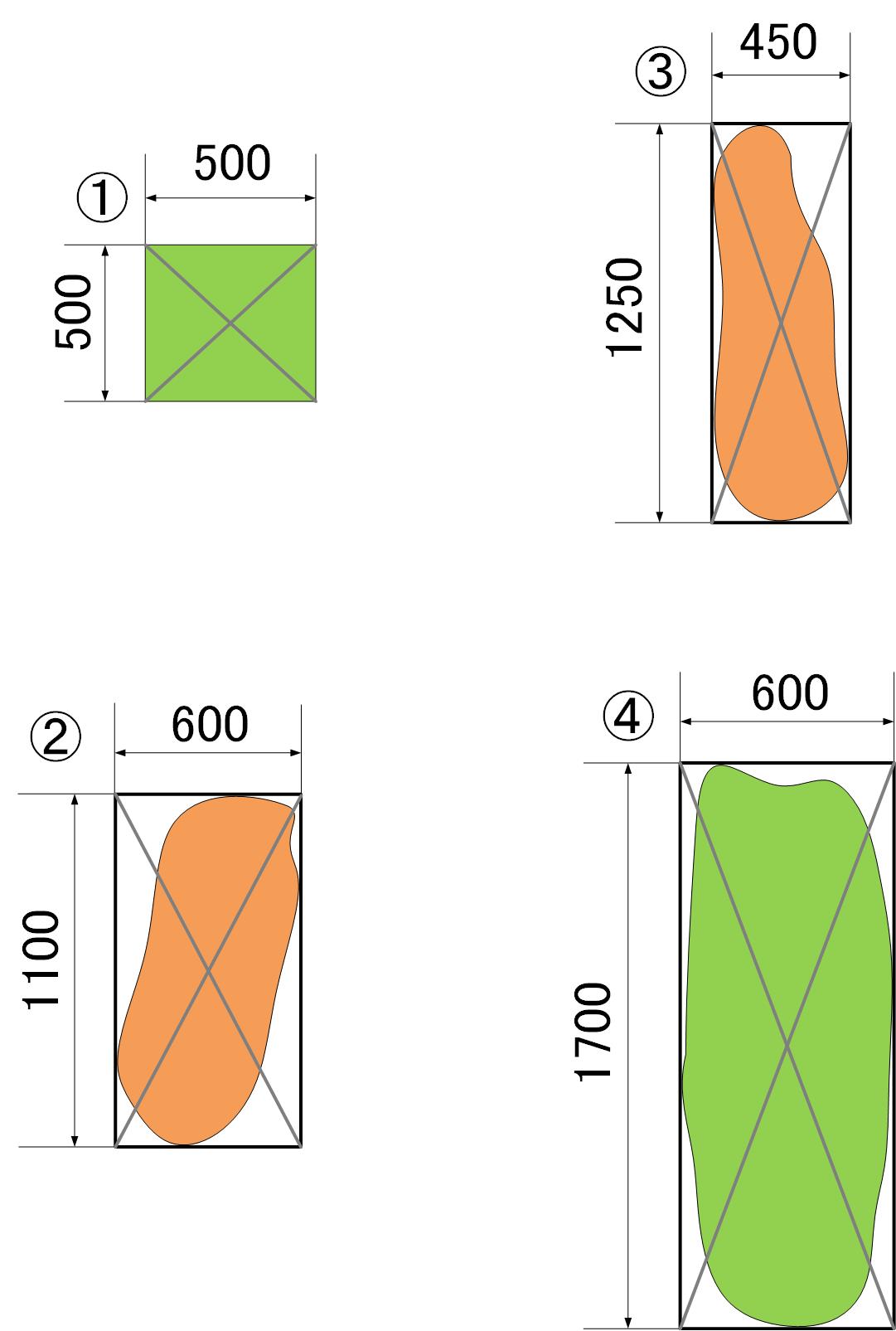
図1-2 ティーグランド、バンカー、グリーンの寸法 |
フェアウェイ
- フェアウェイは図2の人工芝を使用します。
- 人工芝はホームセンター等で販売している毛足が約6mmのものです。
ホームセンタD2では幅910mm×長さ1000mmのものを1200円程度で販売しています。

図2 人工芝 |
ティーグランド、グリーン及びスタートエリア
- ティーグランド、グリーン及びスタートエリアにはタイルカーペットMT-07A GR図3を使用します。
- タイルカーペットはホームセンター等で購入できます。
図3 タイルカーペット |
ラフ
- ラフには「D2ORIGINAL グリーンフェンスカバー」図4を使用します。
- 「D2ORIGINAL グリーンフェンスカバー」はホームセンタD2で、1000円程度で購入できます。

図4 D2ORIGINAL グリーンフェンスカバー |
バンカー
- バンカーは砂を図5のよう撒きます。
- バンカーの深さは最大5mmです。
- バンカーの側面の勾配は実際のフィールドでは図のとおりになるとは限りません。
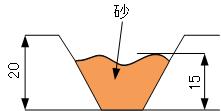
図5 バンカー断面図 |
ボール
- ボールは図6の物を使用します。
- ボールの直径は約42mmです。
- 今回使用するボールの色は赤黄青の3色とします。
- ボールはゴルフ用品を販売している店舗等で入手可能です。

図6 ボール |
フィールド2
- フィールドはウレタン発泡の土台の上に制作します。基本的に高低差はありません。
- フィールドの画像のDLはこちらからお願いします。
- フィールド2は会場の床(コンクリート)の上に直接設置します。
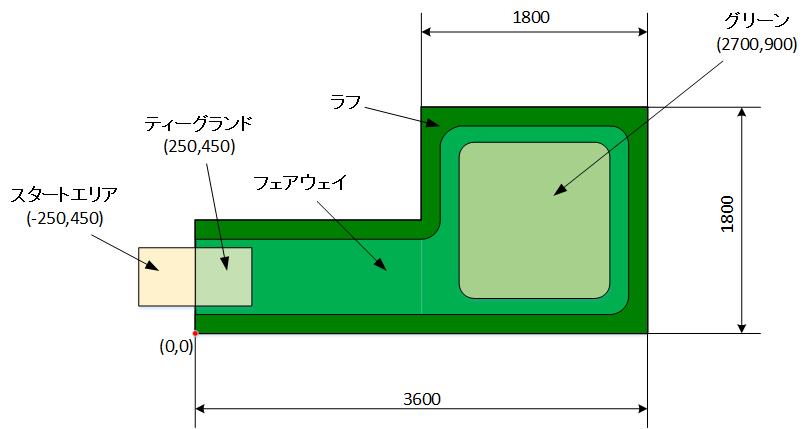
図7 フィールド2 競技コート |
